


中国科研团队成功破解多旋翼无人机飞行失控难题
设想一下,一架四旋翼无人机飞行途中,部分螺旋桨无法旋转,如何依然保持安全飞行?北京航空航天大学科研团队历经多年研究,在多旋翼无人机容错控制技术方面取得重要突破,为上述难题找到答案。相关成果近日在机器人领域重要国际学术期刊《IEEE机器人学汇刊》发表。

图为正在飞行的仅一个螺旋桨工作的四旋翼无人机照片。(科研团队供图)
工业巡检、消防救援、包裹递送、拍照摄像……无人机已深入大众生产生活。常见微小型无人机涉及多旋翼、固定翼、直升机等类型,其中多旋翼无人机是目前应用最广泛的飞行器之一,其通过多个螺旋桨提供升力,具有垂直起降和悬停能力。然而,无人机快速普及之时,常出现因极端天气、碰撞障碍物等导致“罢工”坠地的情况,造成人财物损失。如何提升飞行安全性,成为行业紧迫课题。
北航自动化科学与电气工程学院可靠飞行控制团队,以四旋翼无人机切入研究,针对飞行器执行机构突发故障后的受力特点,成功设计出被动容灾控制算法。团队通过实验验证发现,四旋翼无人机的“控制大脑”搭载该算法后,即便有三个螺旋桨失效,仍可保持安全飞行并实现可控返航。该团队成员、北航柯晨旭博士说,相关成果可拓展应用于六旋翼、八旋翼等多旋翼无人机。

图为仅一个螺旋桨工作的四旋翼无人机飞行动图(0.1倍速)(科研团队供图)
“如果部分螺旋桨失灵,无人机整体平衡就会被打破,机身会像陀螺一样自转起来,螺旋桨出现‘公转’。借助这种现象,我们研发的算法能让正常运转的螺旋桨‘分身’,提供全部的升力——这好比打乒乓球,如果一个人运动速度足够快,可实现自己发球、自己跑到对面接球,如此往复,完成一个人的球赛。”北航教授、该团队成员全权说。
全权表示,未来该成果将应用于新型多旋翼无人机研发,提升多旋翼无人机飞行安全性能。
《IEEE机器人学汇刊》审稿人评价,该研究创新性运用被动容灾控制算法,有望为无人机飞行安全方面的科研提供可靠参考。
(新华社 记者:赵旭)

 肖千大使在悉尼科技大学澳中关系研究院“大使对话会”发表主旨演
肖千大使在悉尼科技大学澳中关系研究院“大使对话会”发表主旨演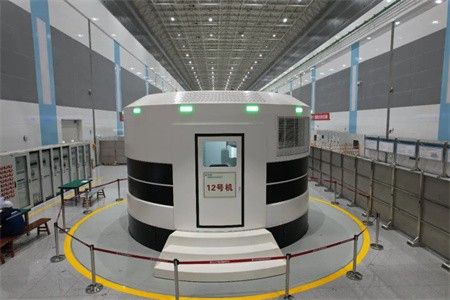 更稳定的大号“充电宝”,开始投产→
更稳定的大号“充电宝”,开始投产→ 天哪,怎么这么好看的颜值?世界人民都不淡定了......
天哪,怎么这么好看的颜值?世界人民都不淡定了...... 高清大图|2024年中非合作论坛北京峰会即将开幕
高清大图|2024年中非合作论坛北京峰会即将开幕 组图:山水之约 玉龙之邀
组图:山水之约 玉龙之邀 组图:好戏连台!利川南坪第三届美食文化周开幕!
组图:好戏连台!利川南坪第三届美食文化周开幕! 巴黎最美战袍出炉,东方审美该有的姿态值得收藏
巴黎最美战袍出炉,东方审美该有的姿态值得收藏 铺就体育强国的路
铺就体育强国的路 快来收藏!巴黎奥运会开幕式精彩瞬间
快来收藏!巴黎奥运会开幕式精彩瞬间 贵州的风景拼图美翻天
贵州的风景拼图美翻天

 可精准杀伤癌细胞!中国“治疗利器”实现量产
可精准杀伤癌细胞!中国“治疗利器”实现量产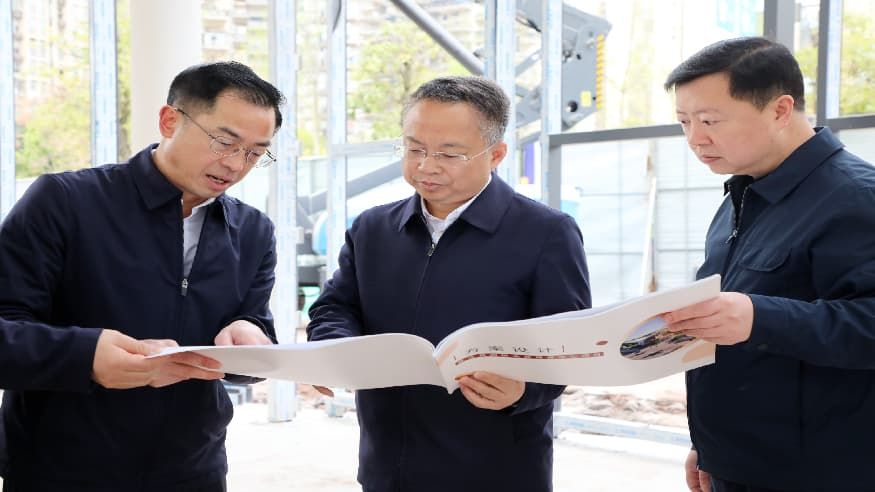 杨勇调研督导民生领域重点项目建设和民生实事推进情况
杨勇调研督导民生领域重点项目建设和民生实事推进情况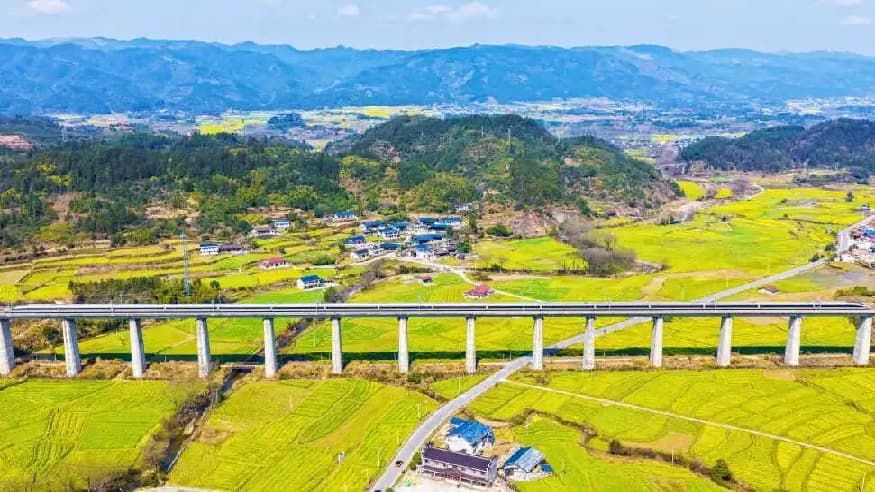 中国高铁清洁袋图案与窗外风景一样迷到你中国高铁清洁袋图案与窗外风景一样迷到你
中国高铁清洁袋图案与窗外风景一样迷到你中国高铁清洁袋图案与窗外风景一样迷到你 对“环保老赖”要一督到底
对“环保老赖”要一督到底 阿勒泰的四季美到窒息!
阿勒泰的四季美到窒息! 日本政府被喊话:向中国道歉!
日本政府被喊话:向中国道歉! 镇村联动 纪委护航——全面深化农村集体“三资”规范化管理
镇村联动 纪委护航——全面深化农村集体“三资”规范化管理 重要提醒:请在阿曼中国公民务必加强安全防范
重要提醒:请在阿曼中国公民务必加强安全防范 驻越南使馆召开领事协助志愿者工作总结暨表彰会
驻越南使馆召开领事协助志愿者工作总结暨表彰会